|
I served as a research intern at Tencent Robotics X Lab from May. 2022 to Oct. 2022, focusing on robot dexterous manipulation.
|

|
|
|

|
Lei Yao, Yi Wang, Yawen Cui, Moyun Liu, Lap-Pui Chau [paper] | [code] 
Under Review 🏆 First place on CVPR 2025 ScanNet++ Challenge. We introduce LaSSM, prioritizing simplicity and efficiency while maintaining competitive performance. |
|
Lei Yao, Yi Wang, Moyun Liu, Lap-Pui Chau [page] | [arxiv] | [demo] | [code] 
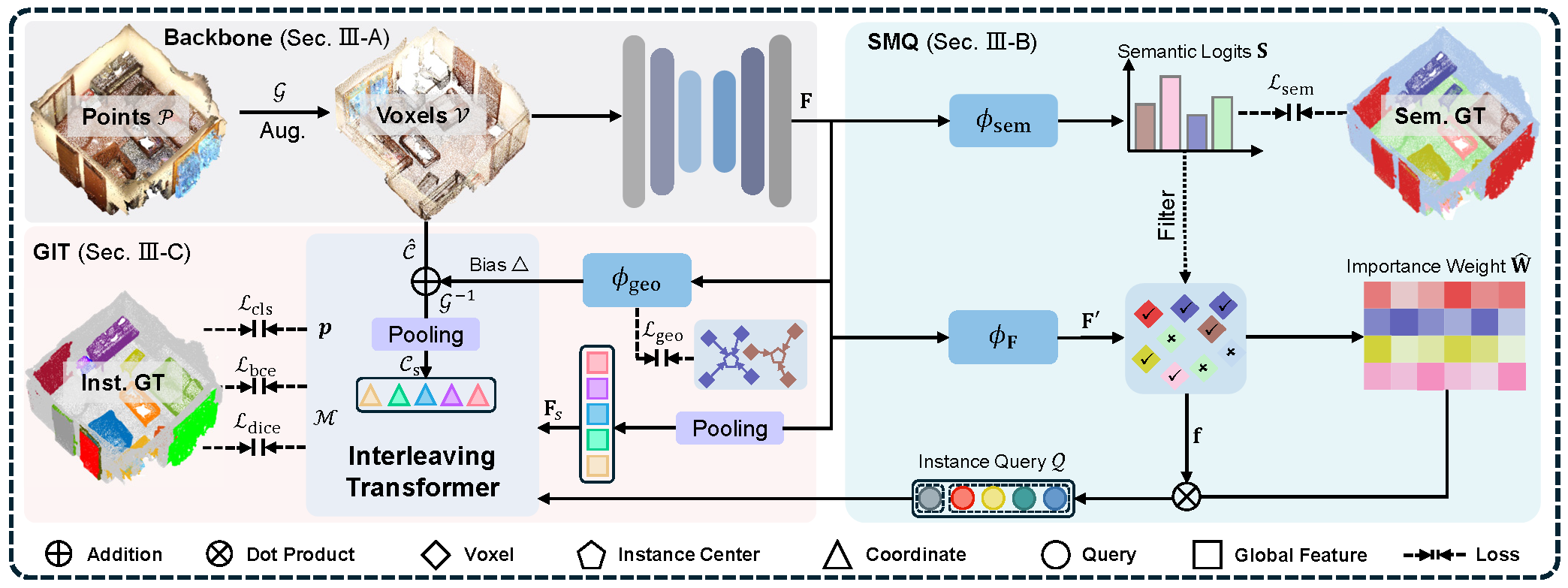
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2024 🏆 Second place on CVPR 2025 ScanNet++ Challenge*. * Reproduced by the organizers based on our code. We introduce SGIFormer for 3D instance segmentation, which combines semantic-guided query initialization and geometric-enhanced interleaving transformer. |
|
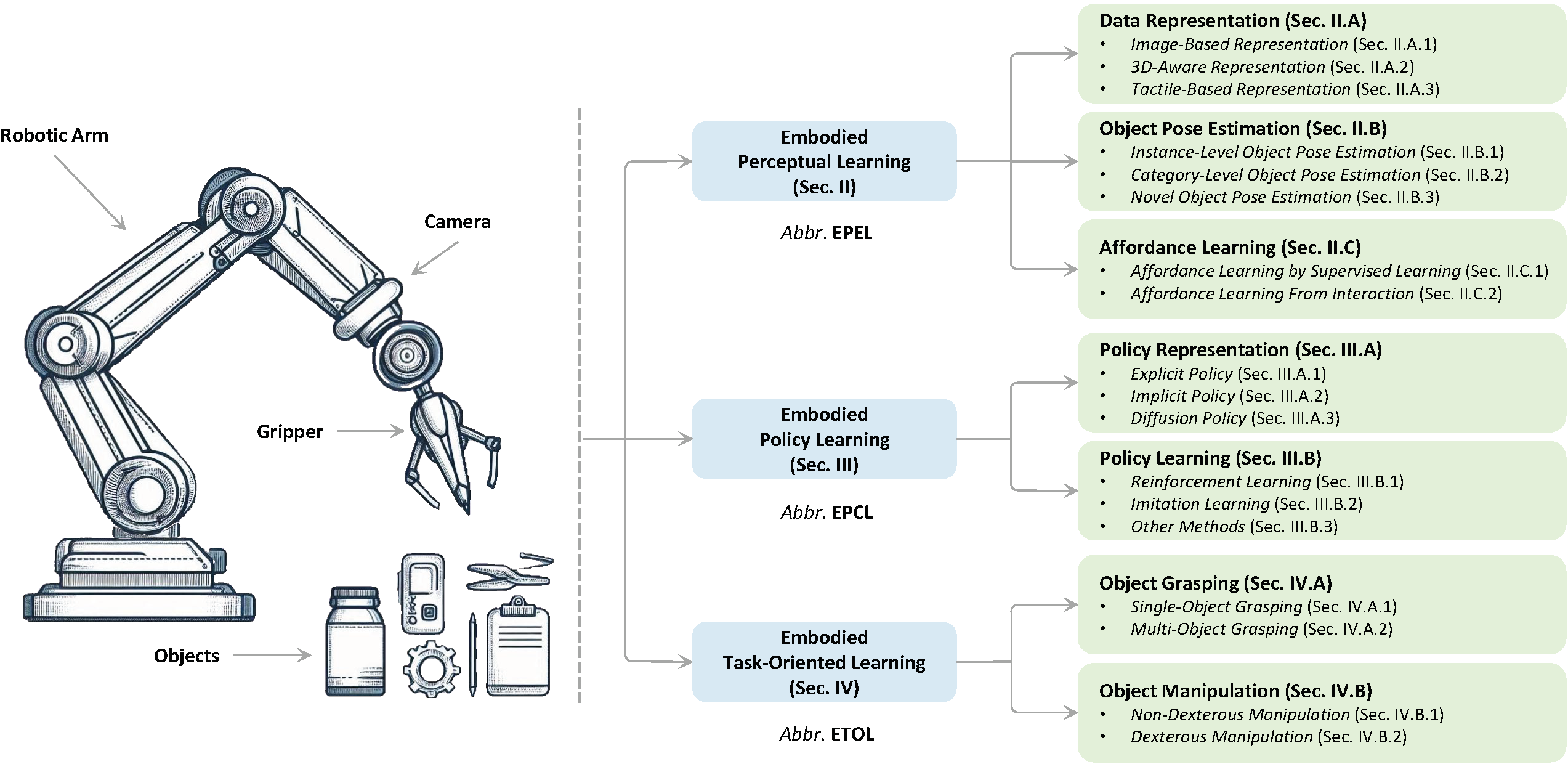
Ying Zheng*, Lei Yao*, Yuejiao Su, Yi Zhang, Yi Wang, Sicheng Zhao, Yiyi Zhang, Lap-Pui Chau [arxiv] | [code] 
Machine Intelligence Research, 2025 We provide a comprehensive survey of embodied perceptual learning, embodied policy learning, and embodied task-oriented learning |

|
Bang You, Bing Chen, Lei Yao, Youping Chen, Jingming Xie [paper] | [code] Expert Systems with Applications, 2024 We propose an information-theoretic dynamic bottleneck objective with a predictable parametric prior for learning compressive and dynamic-relevant representations. |
|
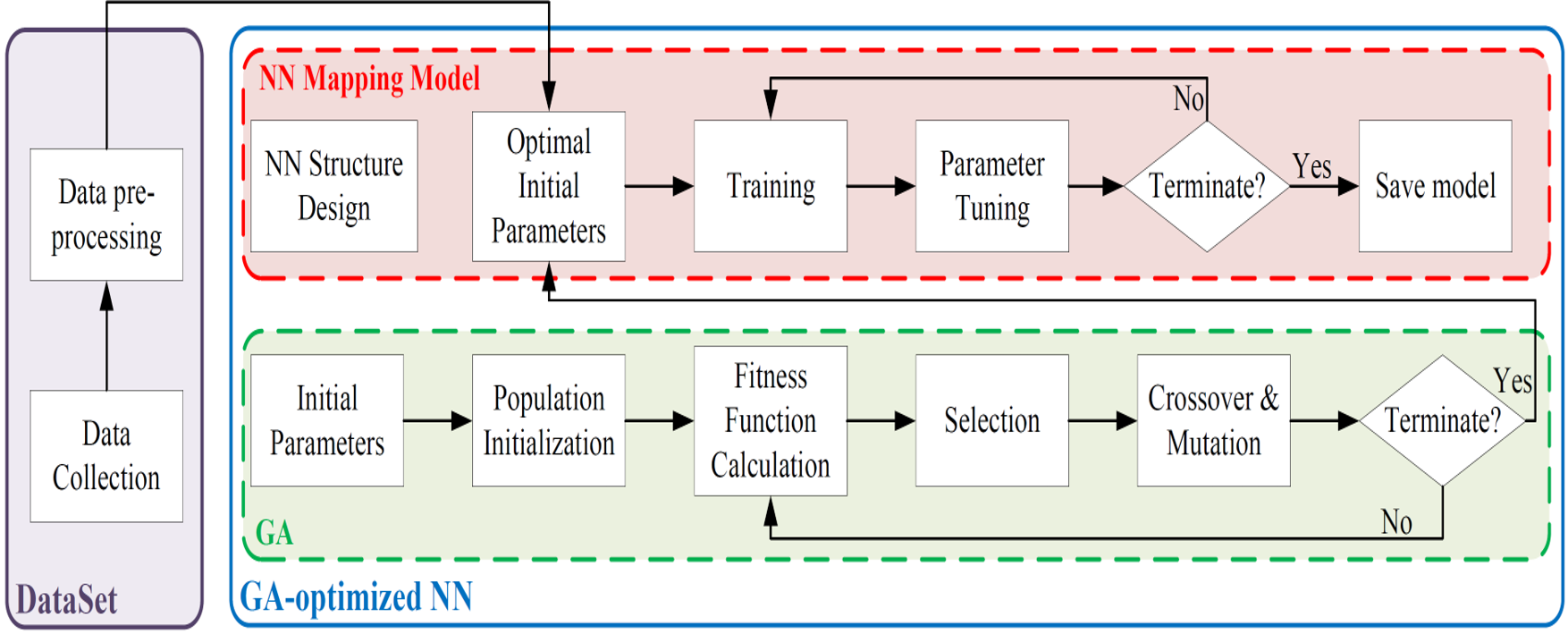
Lei Yao, Bing Chen, Moyun Liu, Jingming Xie, Youping Chen, Lei He [paper] ROBIO, 2023 (Oral Presentation) We model and predict phantom zeros based on a GA-optimized NN during kinesthetic demonstration. |
|
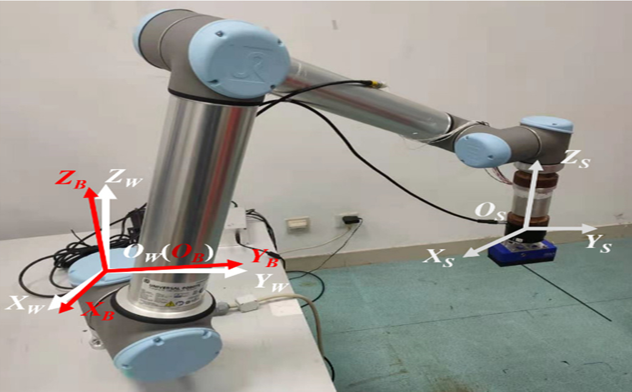
Lei Yao, Qingguang Gao, Dailin Zhang, Wanpeng Zhang, Youping Chen [paper] Sensor, 2021 We propose an integrated compensation method to eliminate the disturbances of zero drift, system error, and gravity of robot end-effector. |
|
|


|
Teaching Assistant: Reviewer: |
 |
2023.08 - Present PhD Student , Supervisors: Prof. Lap-Pui Chau |
|
2020.9 - 2023.6 Master Student, Supervisor: Prof. Youping Chen |
|
|
2016.9 - 2020.6 Undergraduate Student, Supervisor: Prof. Youping Chen |
|
2022.05 - 2022.10 Research Intern, Robot Dexterous Manipulation Leader: Dr. Yu Zheng |
|
|
2019.1 - 2019.2 Winter School, |
|
|