





Hong Kong Polytechnic University (PolyU)
2023.08 - Present
PhD Student, Department of Electrical and Electronic Engineering
Supervisor: Prof. Lap-Pui Chau
I am a PhD candidate with the Department of Electrical and Electronic Engineering at the Hong Kong Polytechnic University, supervised by Prof. Lap-Pui Chau. I also work closely with Dr. Yi Wang @ PolyU and Dr. Moyun Liu @ HUST.
I am currently a visiting student in the Department of Computer and Information Science at University of Pennsylvania, advised by Prof. Lingjie Liu within the GRASP Lab.
I received my BSc and MRes in the School of Mechanical Science and Engineering, Huazhong University of Science and Technology advised by Prof. Youping Chen in 2020 and 2023, respectively.
I served as a research intern at Tencent Robotics X Lab from May. 2022 to Oct. 2022, focusing on robot dexterous manipulation.

Photo is generated by Nano Banana
My current research interests lie in Spatial Intelligence, with particular interests in 3D scene understanding and 4D world model learning. My research objective is to build an embodied agent which has the capability to efficiently perceive and interact with complex real-world environment. Previously, I have worked on robot compliance control and nonprehensile manipulation.
We present UniLAP, a unified continuous latent-action policy that models the latent space via flow matching, adapting across embodiments without future frames at inference.
CVPR 2026
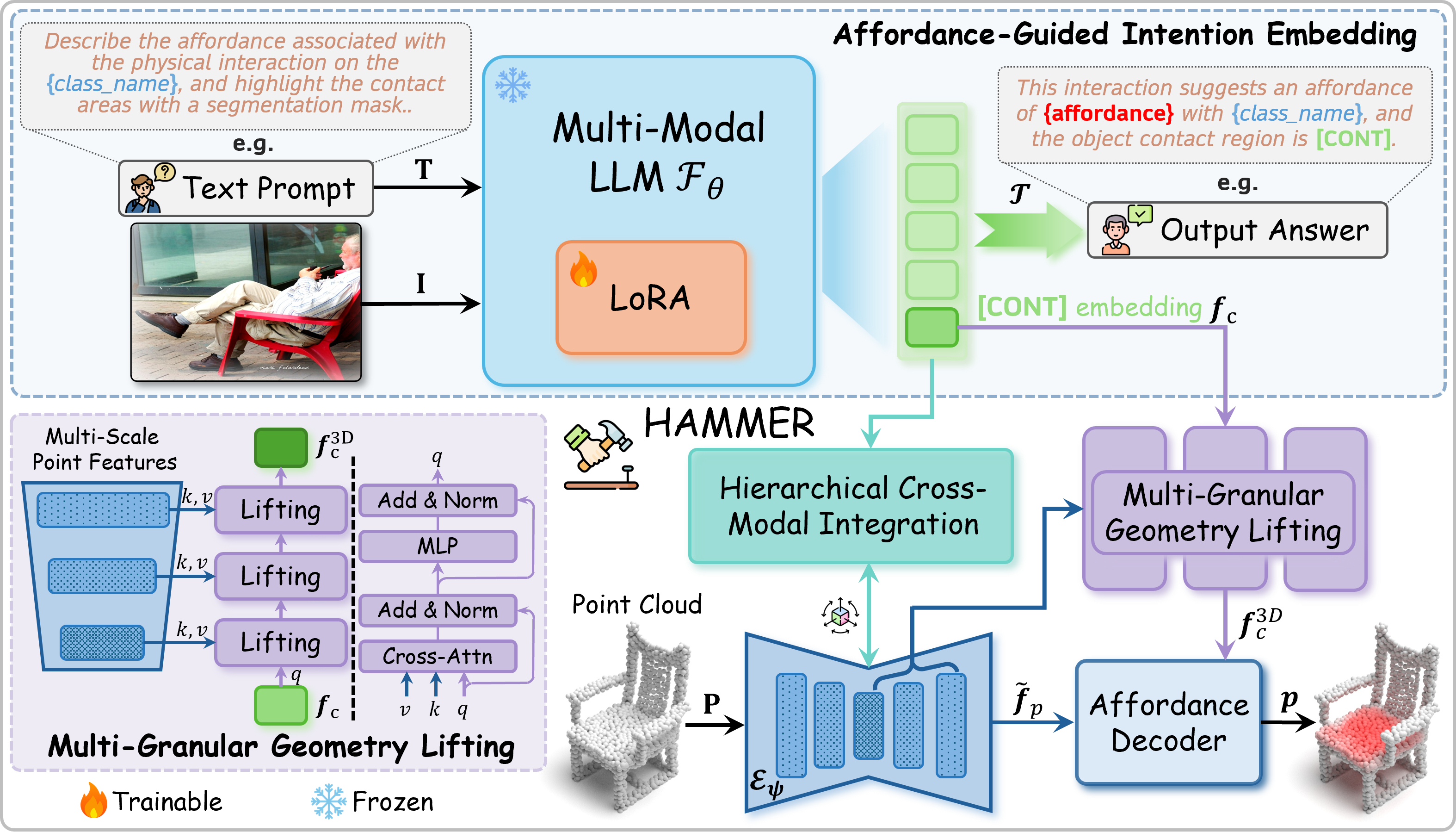
We present Hammer, a novel framework that leverages emerging MLLMs for interaction intention-driven 3D affordance grounding.
ACM MM 2025
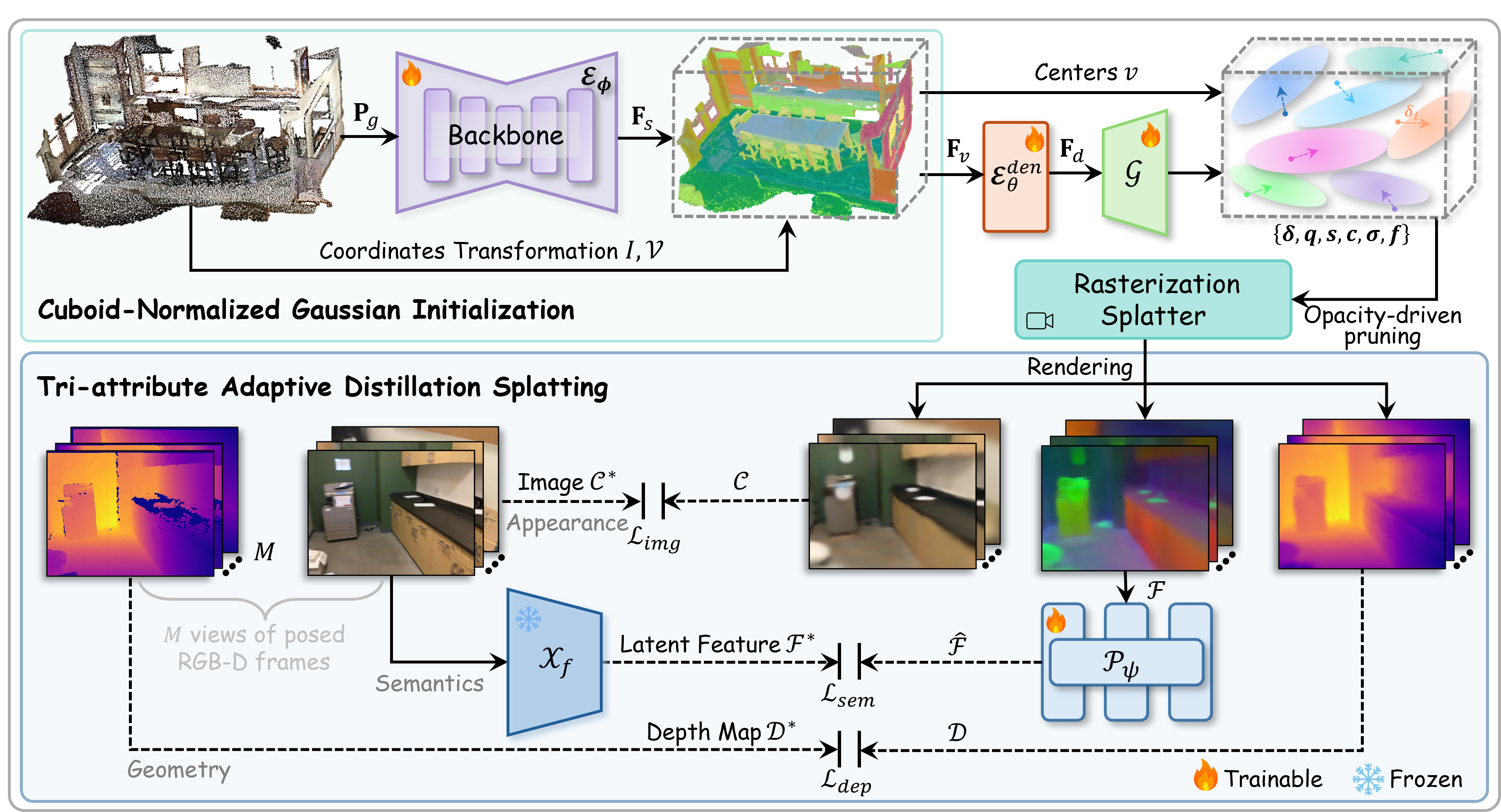
We present GaussianCross, a novel cross-modal self-supervised 3D representation learning architecture integrating feed-forward 3DGS techniques.
page paper arXiv leaderboard code 
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2026
🏆 First place on CVPR 2025 ScanNet++ Challenge.
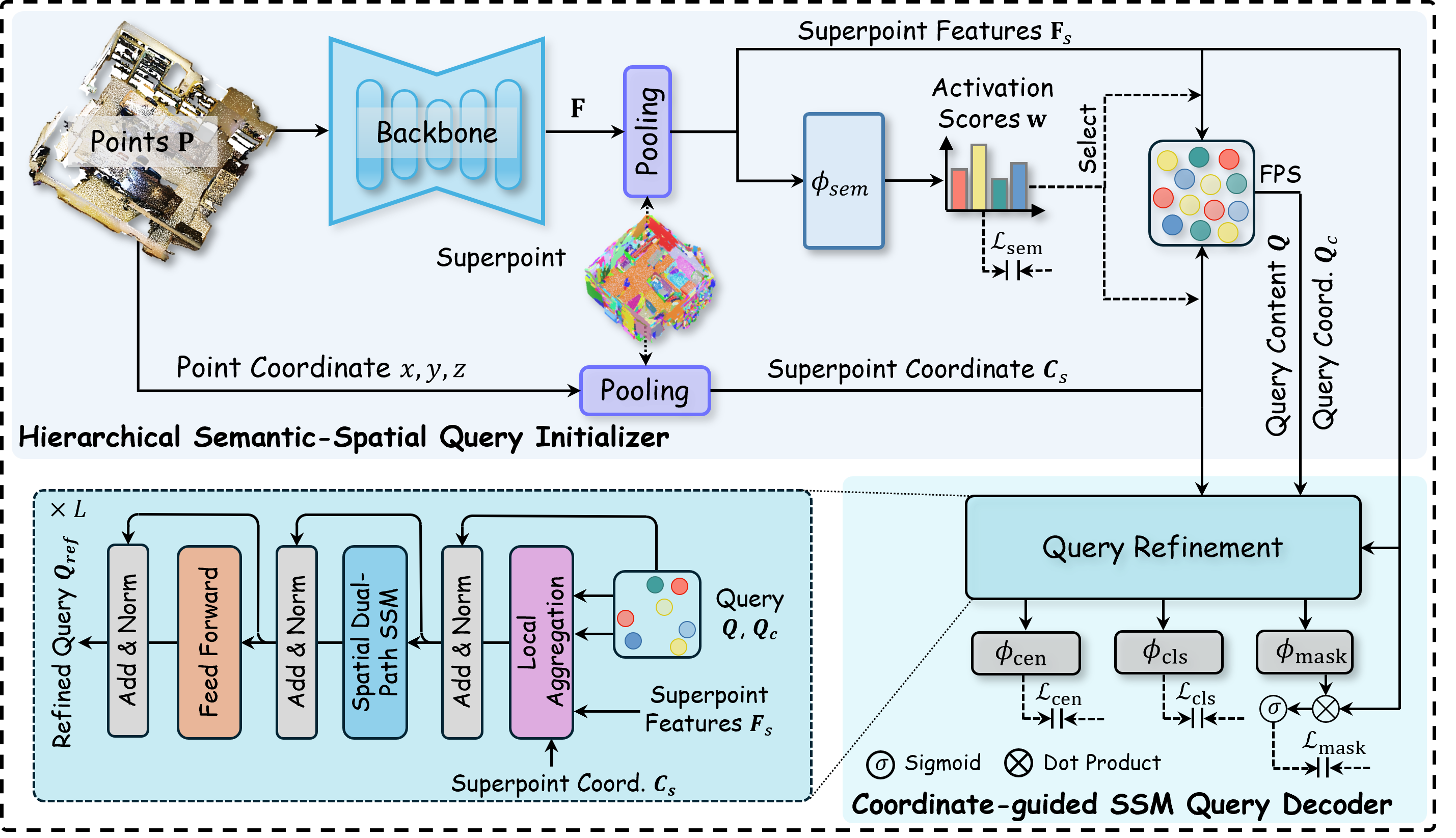
We introduce LaSSM, prioritizing simplicity and efficiency while maintaining competitive performance.
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2024
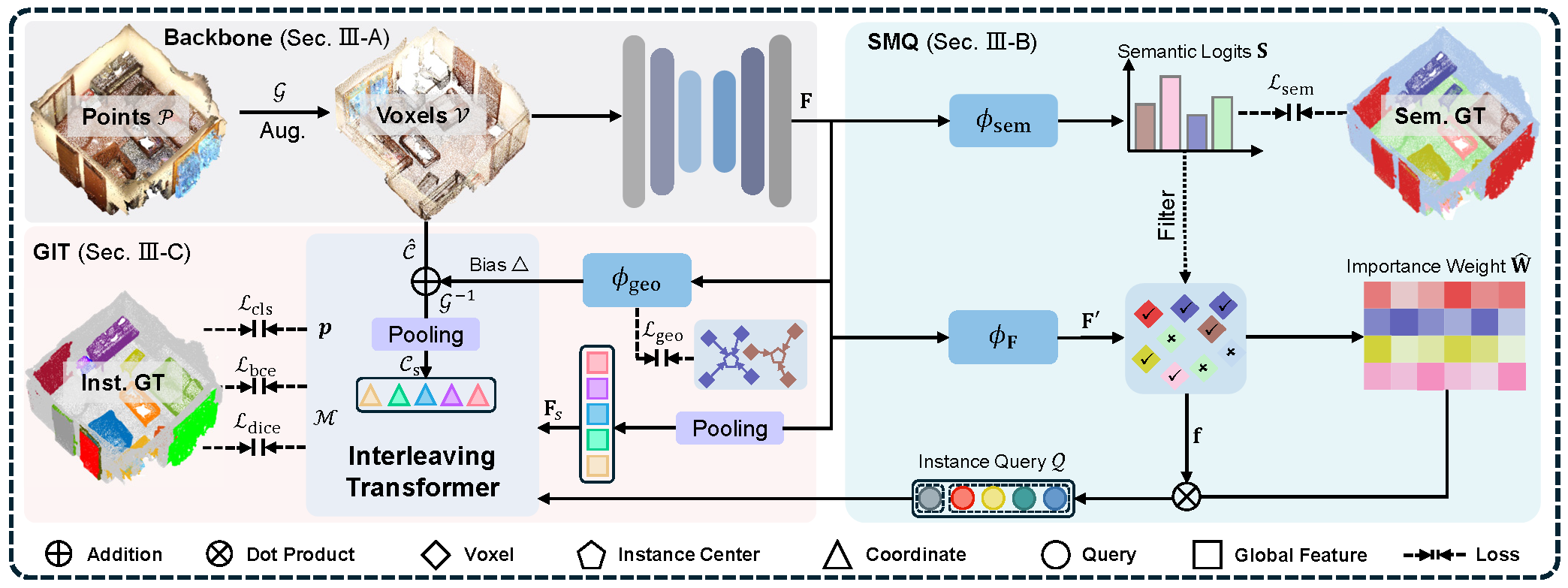
🏆 Second place on CVPR 2025 ScanNet++ Challenge*.
* Reproduced by the organizers based on our code.
We introduce SGIFormer for 3D instance segmentation, which combines semantic-guided query initialization and geometric-enhanced interleaving transformer.
Machine Intelligence Research, 2025
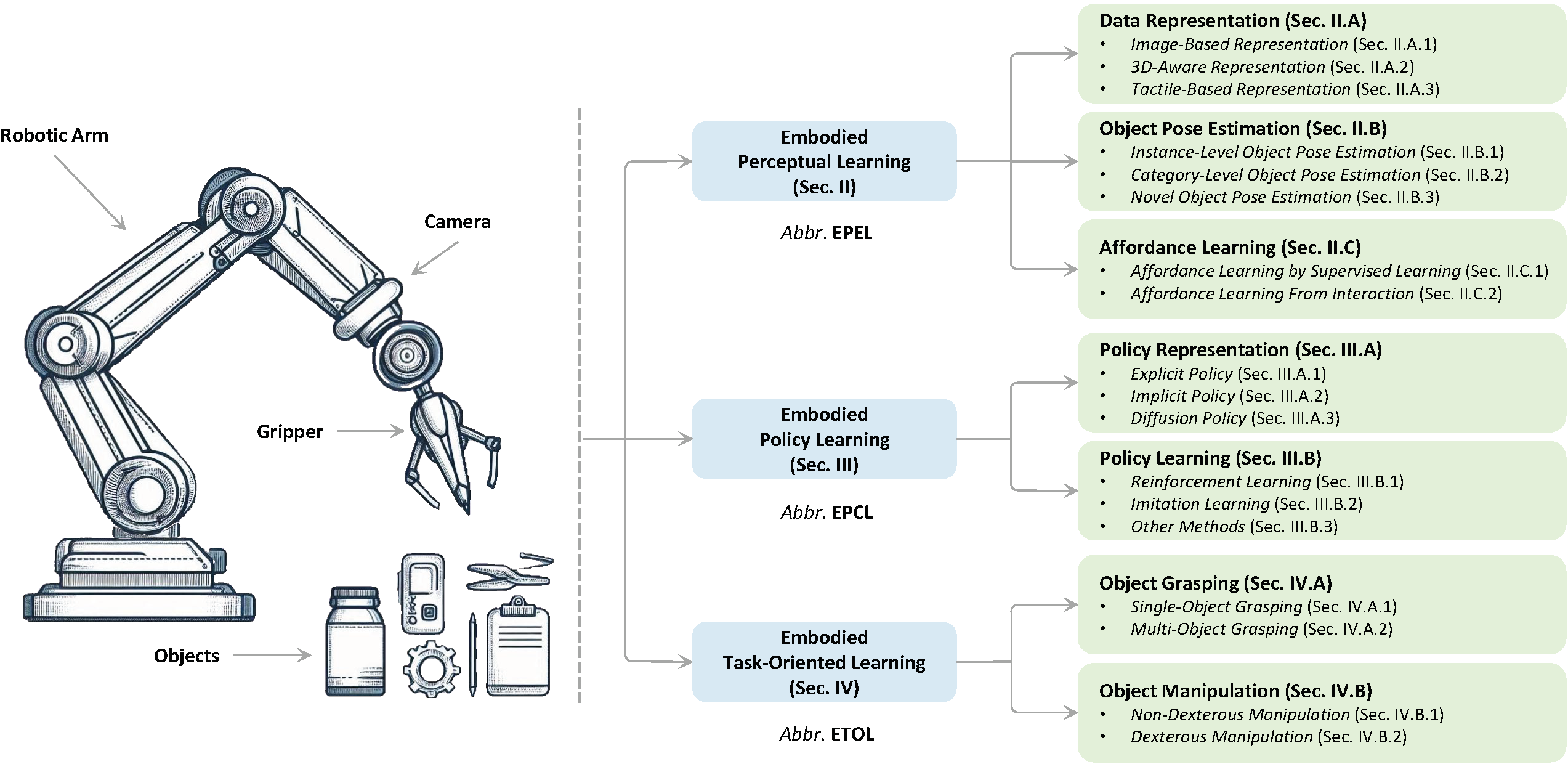
We provide a comprehensive survey of embodied perceptual learning, embodied policy learning, and embodied task-oriented learning
ROBIO, 2023 (Oral Presentation)
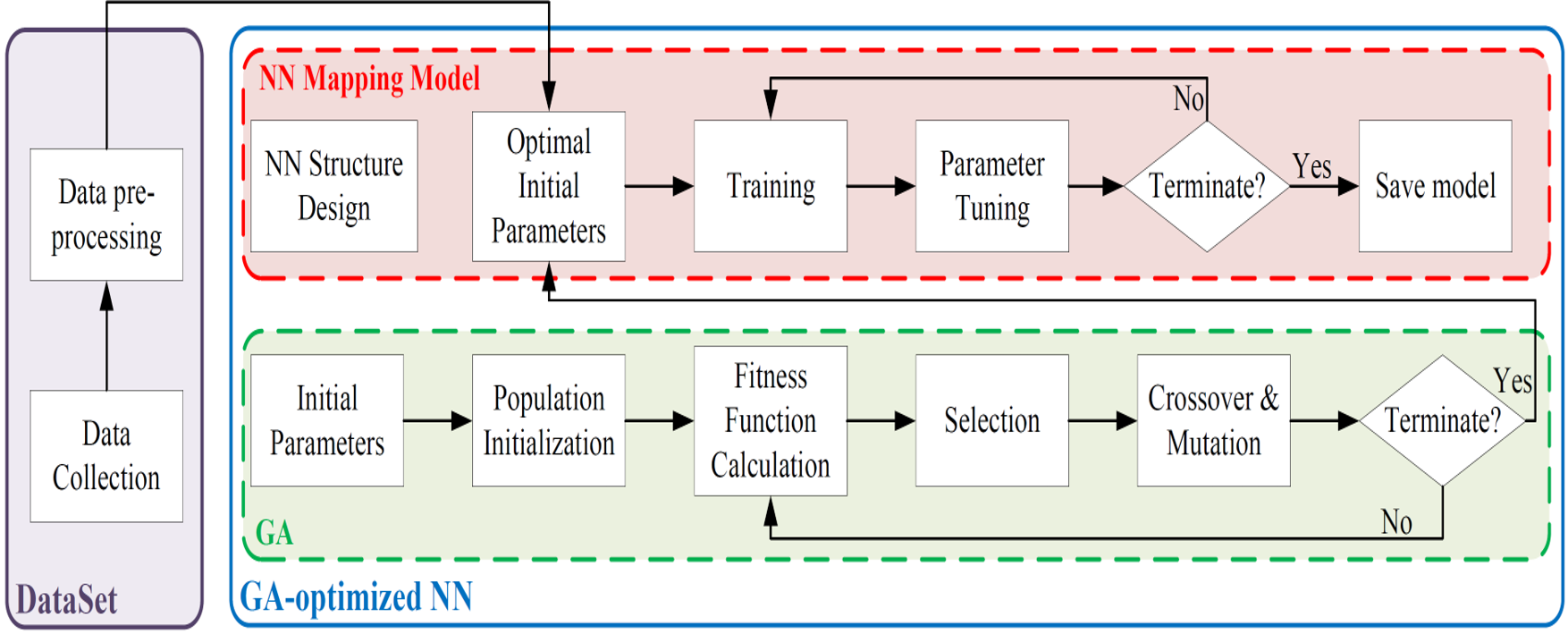
We model and predict phantom zeros based on a GA-optimized NN during kinesthetic demonstration.
Sensors, 2021
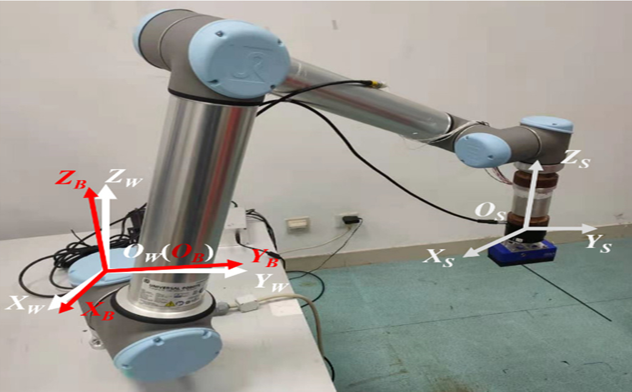
We propose an integrated compensation method to eliminate the disturbances of zero drift, system error, and gravity of robot end-effector.
CVM, 2026 arXiv
Haoyu Zhu, Yi Zhang, Lei Yao, Lap-Pui Chau, Yi Wang
GVSynergy-Det: Synergistic Gaussian-Voxel Representations for Multi-View 3D Object Detection
arXiv, 2025 arXiv
Yi Zhang, Yi Wang, Lei Yao, Lap-Pui Chau
Dynamic Bottleneck with a Predictable Prior for Image-based Deep Reinforcement Learning
Expert Systems with Applications, 2024 code
Bang You, Bing Chen, Lei Yao, Youping Chen, Jingming Xie
Evaluation of Range Sensing-based Place Recognition for Long-term Urban Localization
IEEE Transactions on Intelligent Vehicles (TIV), 2024 code
Weixin Ma, Huan Yin, Lei Yao, Yuxiang Sun, Zhongqing Su
Few-shot Class-agnostic Counting with Occlusion Augmentation and Localization
ISCAS, 2024
Yuejiao Su, Yi Wang, Lei Yao, Lap-Pui Chau
ICML, 2026 arXiv
Yuejiao Su, Xinshen Zhang, Zhen Ye, Lei Yao, Lap-Pui Chau, Yi Wang
MAENet: Boost image-guided point cloud completion more accurate and even
Information Fusion, 2025 code
Moyun Liu, Ziheng Yang, Bing Chen, Youping Chen, Jingming Xie, Lei Yao, Lap-Pui Chau, Jiawei Du, Joey Tianyi Zhou
IEEE Transactions on Intelligent Vehicles (TIV), 2024
Moyun Liu, Bing Chen, Youping Chen, Jingming Xie, Lei Yao, Yang Zhang, Qin Hu, Jiawei Du, Joey Tianyi Zhou
MENet: Multi-Modal Mapping Enhancement Network for 3D Object Detection in Autonomous Driving
IEEE Transactions on Intelligent Transportation Systems, 2024
Moyun Liu, Youping Chen, Jingming Xie, Yijie Zhu, Yang Zhang, Lei Yao, Zhenshan Bing, Genghang Zhuang, Kai Huang, Joey Tianyi Zhou
A Concise but High-performing Network for Image Guided Depth Completion in Autonomous Driving
Knowledge-Based Systems, 2024 code
Moyun Liu, Bing Chen, Youping Chen, Jingming Xie, Lei Yao, Yang Zhang, Joey Tianyi Zhou
MICCAI Workshop, 2024 dataset code
Jing Hao, Moyun Liu, Lei He, Lei Yao, James Kit Hon Tsoi, Kuo Feng Hung
BF3D: Bi-directional Fusion 3D Detector With Semantic Sampling and Geometric Mapping
Image and Vision Computing, 2023 code
Yijie Zhu, Jingming Xie, Moyun Liu, Lei Yao, Youping Chen
Teaching Assistant:
Reviewer:
Hong Kong Polytechnic University (PolyU)
2023.08 - Present
PhD Student, Department of Electrical and Electronic Engineering
Supervisor: Prof. Lap-Pui Chau
Huazhong University of Science and Technology (HUST)
2020.9 - 2023.6
Master Student, School of Mechanical Science and Engineering
Supervisor: Prof. Youping Chen
Huazhong University of Science and Technology (HUST)
2016.9 - 2020.6
Undergraduate Student, School of Mechanical Science and Engineering
Supervisor: Prof. Youping Chen